



Рама для робота с нестандартной порталной конструкцией
Эта статья посвящена проектированию и реализации рамы для робота с нестандартной портальной конструкцией. Мы рассмотрим ключевые аспекты, от выбора материалов и расчета нагрузок до практических примеров применения и советов по оптимизации. Вы узнаете о передовых технологиях, доступных инструментах и лучших практиках, которые помогут вам создать надежную и эффективную робототехническую систему. Мы ориентируемся на практический подход, предлагая конкретные решения и советы, которые можно сразу применить на практике. В статье вы найдете информацию о том, как оптимизировать конструкцию для различных задач, выбирая между различными компонентами и подходами, обеспечивая максимальную производительность и долговечность вашего робота.
Что такое Рама для Робота с Нестандартной Портальной Конструкцией?
Рама для робота с нестандартной портальной конструкцией — это основа робототехнической системы, обеспечивающая механическую поддержку для перемещения и позиционирования компонентов. В отличие от традиционных конструкций, нестандартные портальные системы предлагают гибкость в конфигурации, позволяя адаптировать робота под конкретные задачи и рабочие пространства. Это особенно актуально для задач, требующих высокой точности, больших рабочих зон или доступа к труднодоступным местам.
Преимущества Нестандартных Портальных Конструкций
- Гибкость в проектировании: возможность адаптации к различным формам и размерам рабочих зон.
- Повышенная точность: благодаря жесткости конструкции и оптимизации движения.
- Увеличенная рабочая зона: позволяет охватывать большие площади и сложные траектории.
- Эффективность использования пространства: возможность интеграции в существующие производственные линии.
Выбор Материалов для Рамы
Выбор материала играет ключевую роль в обеспечении прочности, жесткости и долговечности рамы. Основные варианты:
Сталь
Сталь — прочный и недорогой материал. Обеспечивает хорошую жесткость, но подвержен коррозии. Подходит для тяжелых нагрузок.
Алюминий
Алюминий — легкий и коррозионностойкий. Идеален для конструкций, где важен вес. Обладает хорошей прочностью, но может быть дороже стали.
Углеродное волокно
Углеродное волокно — сверхлегкий и очень прочный материал. Обеспечивает высокую жесткость, но дорог в производстве. Применяется в высокотехнологичных роботах.
Расчет Нагрузок и Прочность Конструкции
При проектировании рамы необходимо учитывать:
- Вес полезной нагрузки: вес перемещаемых объектов или инструментов.
- Динамические нагрузки: возникающие при ускорении и торможении.
- Вибрации: влияние внешних факторов и работы двигателей.
- Безопасность: учет коэффициента запаса прочности.
Для расчета нагрузок и прочности рекомендуется использовать:
- Методы конечных элементов (МКЭ): позволяют смоделировать поведение конструкции под нагрузкой.
- Программное обеспечение CAD/CAM: для проектирования и анализа конструкции.
Компоненты Нестандартной Портальной Конструкции
Основные компоненты, влияющие на производительность рамы:
Направляющие
Обеспечивают точное перемещение. Типы: рельсовые направляющие, линейные подшипники, направляющие с профильными рельсами.
Приводы
Отвечают за движение по осям. Типы: ременные приводы, винтовые приводы, зубчатые рейки.
Двигатели
Обеспечивают энергию для приводов. Типы: шаговые двигатели, серводвигатели.
Датчики
Контролируют положение и ориентацию робота. Типы: датчики положения, датчики силы, датчики приближения.
Примеры Применения Нестандартных Портальных Конструкций
Автоматизация Сборки
Пример: Рама используется для перемещения инструмента по сложной траектории для точной сборки компонентов.
Лазерная Резка и Гравировка
Пример: Портальная конструкция обеспечивает точное позиционирование лазерной головки для резки или гравировки материалов.
3D-Печать
Пример: Рама обеспечивает перемещение печатающей головки по трем осям, создавая трехмерные объекты.
Обработка Материалов
Пример: Использование робота для фрезеровки, шлифовки или других видов обработки материалов.
Проектирование Рамы: Шаг за Шагом
Процесс проектирования включает:
- Определение требований к задаче.
- Выбор материалов и компонентов.
- Разработка 3D-модели в CAD-системе.
- Расчет нагрузок и прочности.
- Оптимизация конструкции.
- Производство и сборка.
Программное Обеспечение для Проектирования и Моделирования
Инструменты, облегчающие проектирование рам:
- AutoCAD: для 2D и 3D проектирования.
- SolidWorks: мощное CAD/CAM/CAE решение.
- Inventor: разработка и моделирование промышленных объектов.
- ANSYS: анализ методом конечных элементов.
Рекомендации по Сборке и Эксплуатации
- Точность сборки: важно соблюдать все размеры и допуски.
- Регулярное техническое обслуживание: проверка и смазка направляющих, затяжка болтов.
- Калибровка: настройка датчиков и позиционирования.
- Безопасность: соблюдение правил техники безопасности.
Оптимизация Рамы для Повышения Производительности
Методы оптимизации:
- Снижение веса: использование легких материалов и оптимизация формы.
- Увеличение жесткости: выбор подходящих материалов и усиление конструкции.
- Уменьшение трения: использование качественных направляющих и смазок.
- Оптимизация управления: использование современных контроллеров и алгоритмов управления.
Практические Советы и Лайфхаки
- Использование 3D-печати для прототипирования: быстрое создание моделей и тестирование.
- Совместная работа с экспертами: консультации с инженерами-конструкторами.
- Поиск готовых решений и шаблонов: экономия времени и ресурсов.
- Обучение и повышение квалификации: изучение новых технологий и методов.
Заключение
Проектирование и реализация рамы для робота с нестандартной портальной конструкцией требует комплексного подхода, учитывающего множество факторов. Однако, благодаря современным технологиям и инструментам, создание эффективной и надежной системы становится все более доступным. От выбора материалов до оптимизации управления, каждый этап важен для достижения оптимальной производительности. Следуйте советам этой статьи, и вы сможете успешно реализовать свои проекты в области робототехники.
Если вам требуется больше информации о компонентах и решениях для рамы, вы можете обратиться к ООО Ханчжоу Лунху Механика и Электроника Технологии для консультации и подбора необходимого оборудования.
Соответствующая продукция
Соответствующая продукция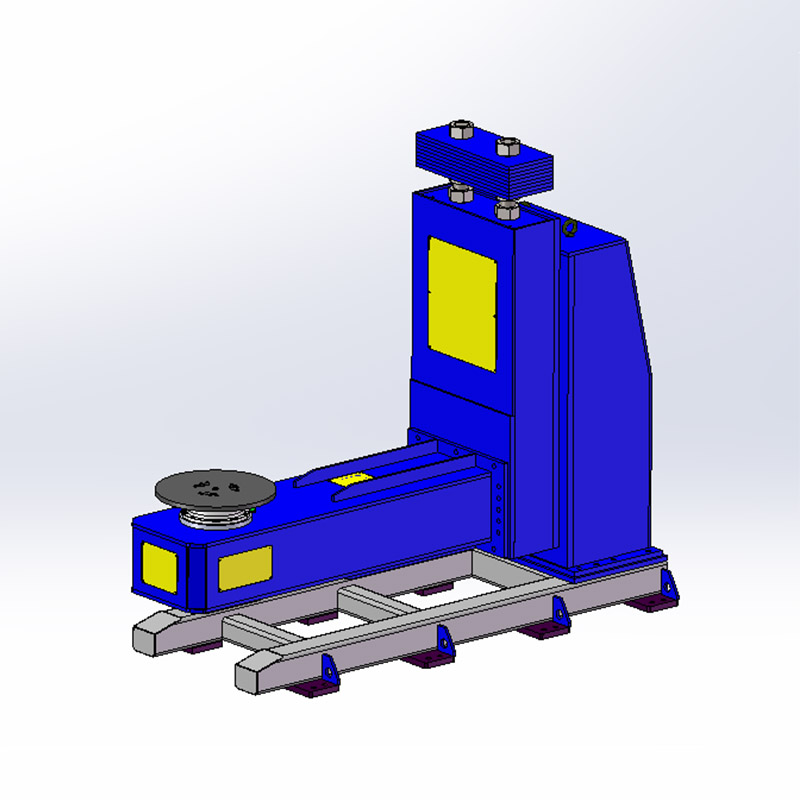

Самые продаваемые продукты
Самые продаваемые продукты-
 Роботизированная автоматическая погрузочно-разгрузочная производственная линия
Роботизированная автоматическая погрузочно-разгрузочная производственная линия -
 Серия SP точечной сварки YASKAWA
Серия SP точечной сварки YASKAWA -
 Серия сварки FANUC
Серия сварки FANUC -
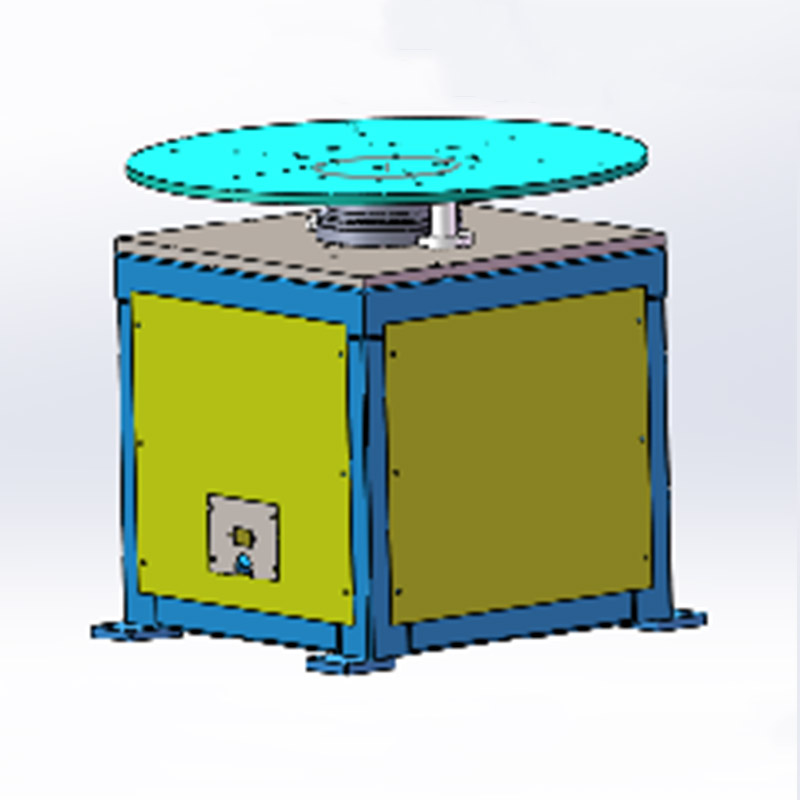 Одноосный горизонтальный вращающийся позиционер
Одноосный горизонтальный вращающийся позиционер -
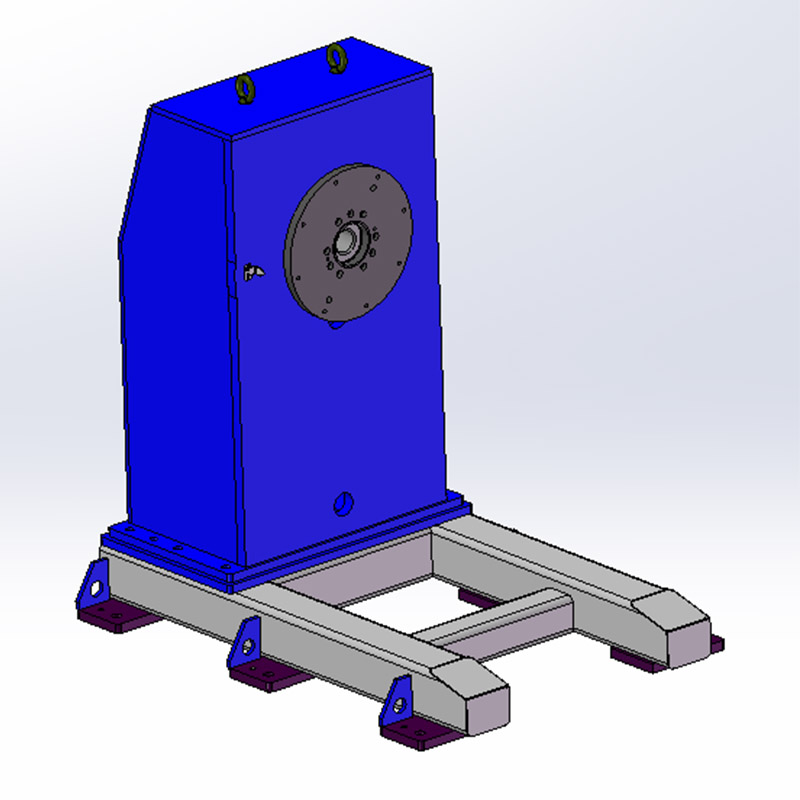
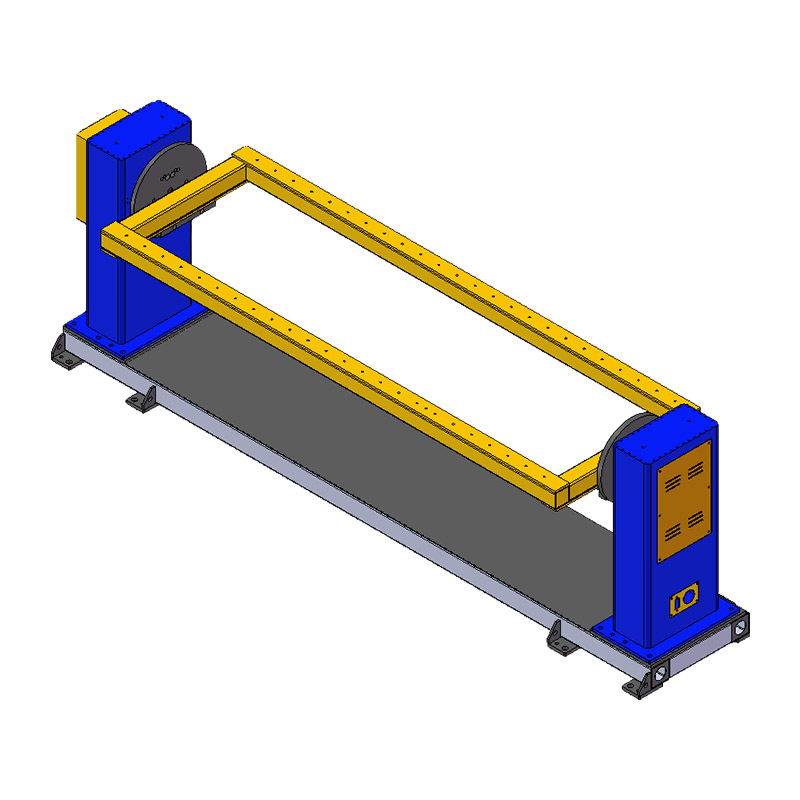 Одноосевой позиционер головы и хвоста
Одноосевой позиционер головы и хвоста -
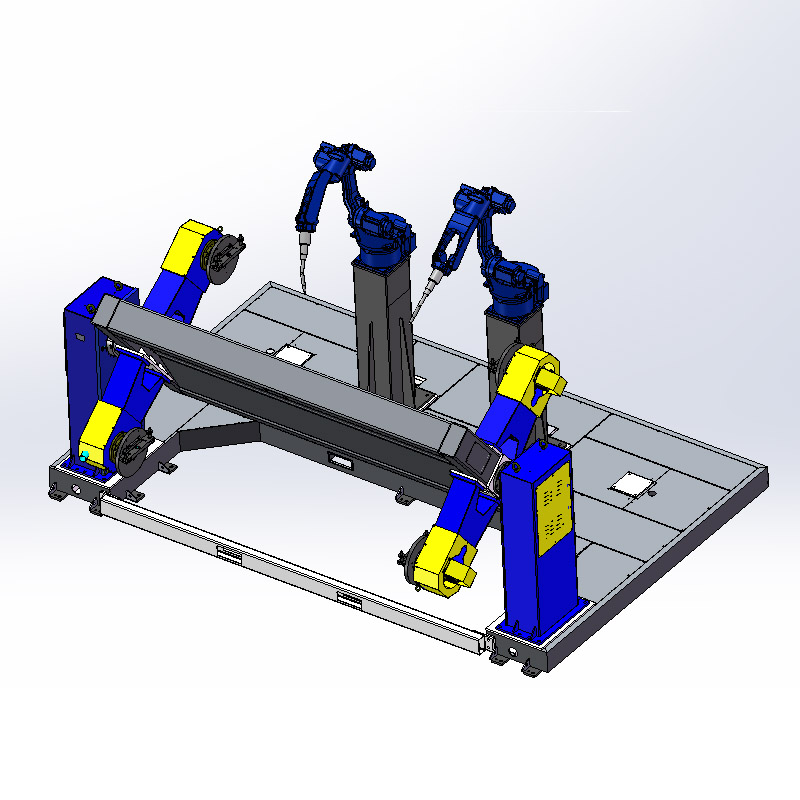
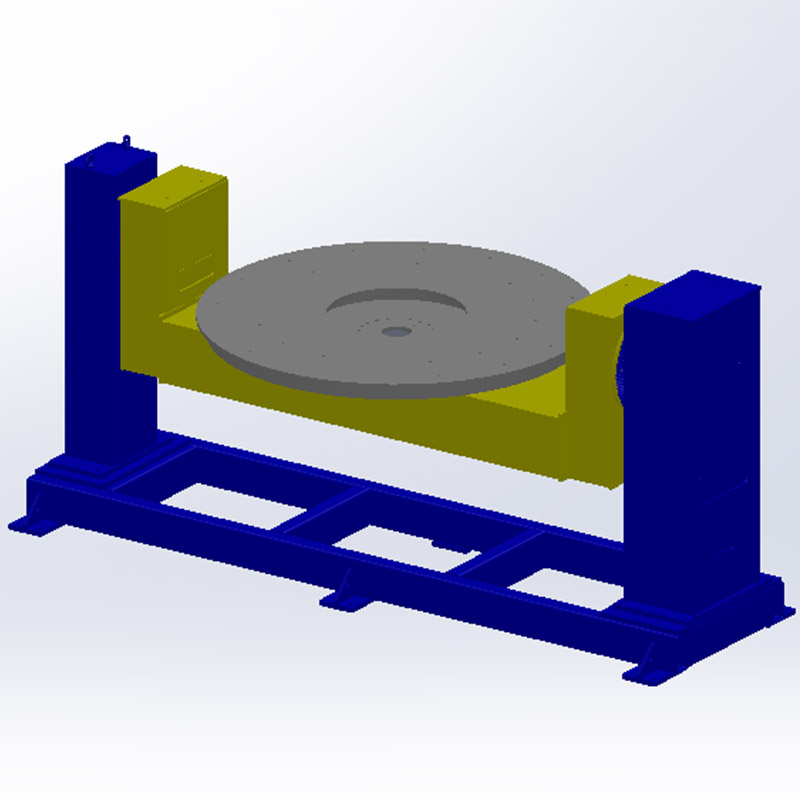 Двухосевой большой U-образный позиционер
Двухосевой большой U-образный позиционер -
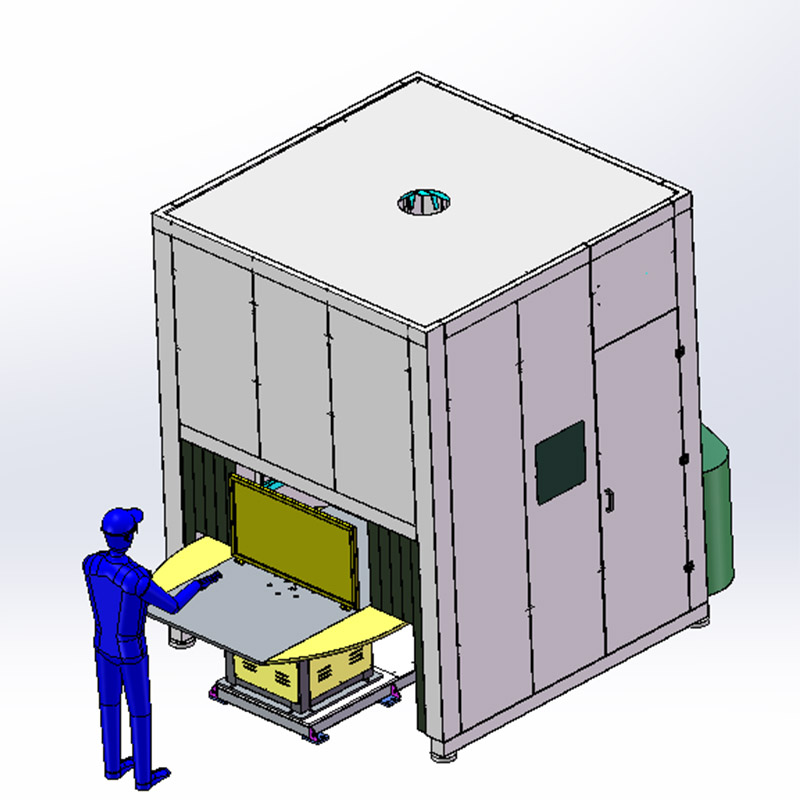 Сварочная рабочая станция
Сварочная рабочая станция -
 Скайрейл
Скайрейл -
 Panasonic-TL2000
Panasonic-TL2000 -
 База робота
База робота -
 OTC-FD-V6S
OTC-FD-V6S -
 Серия AR дуговой сварки YASKAWA
Серия AR дуговой сварки YASKAWA
Связанный поиск
Связанный поиск- Установка для очистки оружия
- Ведущий покупатель сварных защитных дверей
- Китайские рельсы для роботов
- Ведущий покупатель дешевых малых роботов
- Ведущие страны-покупатели U-образных перевертышей из Китая
- Ведущий покупатель автоматизированных роботизированных линий погрузки и разгрузки
- Поставщики роботизированных автоматических погрузочно-разгрузочных линий
- Цены на сварочный инструмент
- Завод моторизованных перегружателей
- Завод сервоперемещателей