



Проектирование манипуляторной базы
Проектирование манипуляторной базы – это сложный, но увлекательный процесс, требующий глубоких знаний в области механики, электроники и программирования. Правильно спроектированная манипуляторная база обеспечивает стабильность, точность и эффективность работы роботизированной системы. В этой статье мы рассмотрим ключевые этапы проектирования, чтобы помочь вам разработать оптимальную конструкцию.
1. Определение требований и целей
Первый шаг в проектировании манипуляторной базы – это четкое определение требований к системе. Необходимо определить:
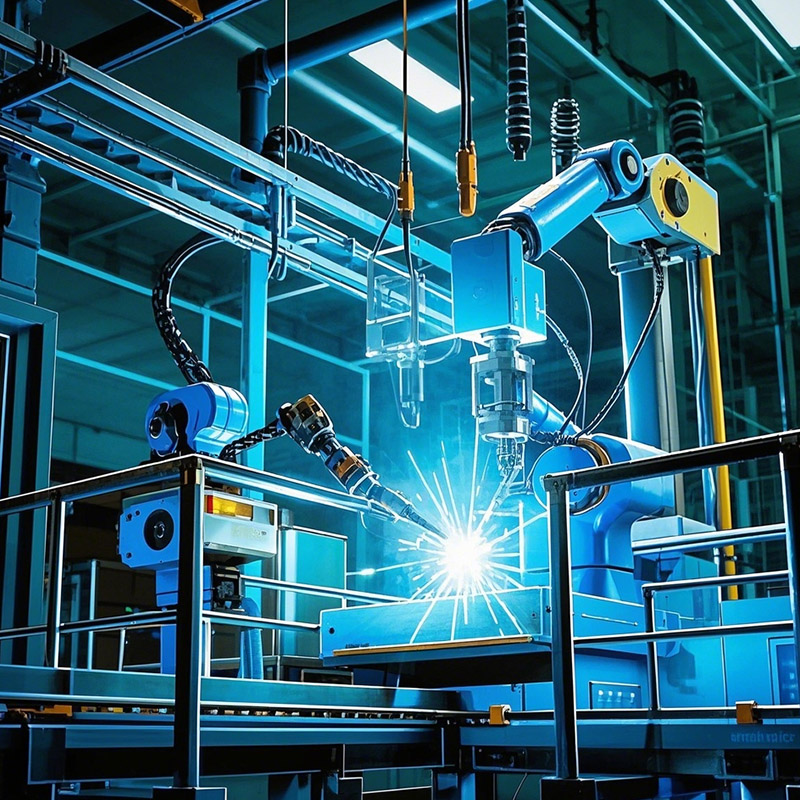
- Задачи манипулятора: какие операции он должен выполнять (сборка, сварка, перемещение объектов и т.д.).
- Размеры и вес объектов: максимальный вес, который должен выдерживать манипулятор, и габариты объектов.
- Рабочая зона: необходимые размеры и форма рабочей зоны.
- Точность и скорость: требуемая точность позиционирования и скорость выполнения операций.
- Условия эксплуатации: температура, влажность, наличие пыли и других факторов, влияющих на работу.
На основе этих данных можно выбрать подходящий тип манипулятора и его конфигурацию.
2. Выбор типа манипулятора и его конфигурации
Существует множество типов манипуляторных баз, каждый из которых имеет свои преимущества и недостатки. Наиболее распространенные типы:
- Декартовы манипуляторы: простые в конструкции, подходят для перемещения по прямым траекториям.
- Цилиндрические манипуляторы: имеют большую рабочую зону, чем декартовы.
- Сферические манипуляторы: обеспечивают широкий диапазон движений, но сложны в управлении.
- Шарнирные манипуляторы: наиболее гибкие, позволяют выполнять сложные операции, но требуют более сложного управления.
Выбор конфигурации зависит от задач, которые должен выполнять манипулятор. Необходимо учитывать количество степеней свободы (DOF) и их расположение.
3. Расчет и выбор компонентов
После выбора типа и конфигурации манипулятора необходимо рассчитать и выбрать компоненты:
- Приводы: выбор серводвигателей, шаговых двигателей или пневматических приводов. Важно учитывать крутящий момент, скорость и точность.
- Редукторы: для увеличения крутящего момента и уменьшения скорости.
- Датчики: для определения положения, скорости и других параметров.
- Механические элементы: выбор материалов (сталь, алюминий, пластик) и проектирование конструкции.
При выборе компонентов необходимо учитывать их надежность, стоимость и доступность.
4. Проектирование механической структуры
Механическая структура манипуляторной базы должна быть прочной, жесткой и обеспечивать требуемую точность. При проектировании необходимо учитывать:
- Материалы: выбор материалов с учетом их прочности, веса и устойчивости к коррозии.
- Конструкцию: проектирование соединений, шарниров, направляющих и других элементов.
- Производство: учет технологических возможностей для изготовления компонентов.
Для проектирования механической структуры можно использовать программное обеспечение CAD, например, Autodesk Fusion 360.
5. Выбор системы управления и программирование
Система управления отвечает за координацию работы приводов и датчиков. Она включает в себя:
- Контроллер: микроконтроллер или промышленный контроллер (PLC).
- Драйверы двигателей: для управления приводами.
- Программное обеспечение: для управления манипулятором и выполнения задач.
Программирование может осуществляться на различных языках, например, C++, Python или специализированных языках для робототехники.
6. Сборка и тестирование
После проектирования и выбора компонентов необходимо собрать манипуляторную базу. Важно соблюдать правильную последовательность сборки и выполнять все необходимые настройки.
После сборки необходимо провести тестирование для проверки работоспособности системы. Тестирование включает в себя:
- Калибровку: настройку датчиков и приводов.
- Проверку точности: измерение точности позиционирования.
- Проверку скорости: измерение скорости выполнения операций.
- Испытания: выполнение различных задач для проверки функциональности.
7. Оптимизация и улучшение
После тестирования необходимо оптимизировать манипуляторную базу. Оптимизация может включать в себя:
- Настройку параметров управления: оптимизацию PID-регуляторов для повышения точности и стабильности.
- Оптимизацию траекторий: разработку оптимальных траекторий движения для повышения скорости и уменьшения энергопотребления.
- Улучшение конструкции: внесение изменений в конструкцию для повышения прочности, жесткости или уменьшения веса.
8. Примеры успешных проектов
Вот несколько примеров успешных проектов манипуляторных баз:
- Промышленные роботы KUKA: KUKA предлагает широкий спектр промышленных роботов для различных задач.
- Роботы FANUC: FANUC – один из лидеров в области робототехники.
- Роботы ABB: ABB предлагает роботов для различных отраслей промышленности.
Эти примеры демонстрируют разнообразие манипуляторных баз и их применение в различных областях.
Если вы хотите узнать больше о проектировании манипуляторной базы, рекомендуем вам посетить сайт ООО Ханчжоу Лунху Механика и Электроника Технологии, где вы найдете дополнительную информацию и полезные ресурсы.
9. Заключение
Проектирование манипуляторной базы – это сложный, но интересный процесс, который требует знаний в различных областях. Следуя представленному руководству, вы сможете создать эффективную и надежную роботизированную систему. Не забывайте о важности определения требований, выбора правильных компонентов и тщательного тестирования. ООО Ханчжоу Лунху Механика и Электроника Технологии готова помочь вам в реализации ваших проектов, предоставляя необходимые компоненты и экспертную поддержку.
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
 Двухосевой малый U-образный позиционер
Двухосевой малый U-образный позиционер -
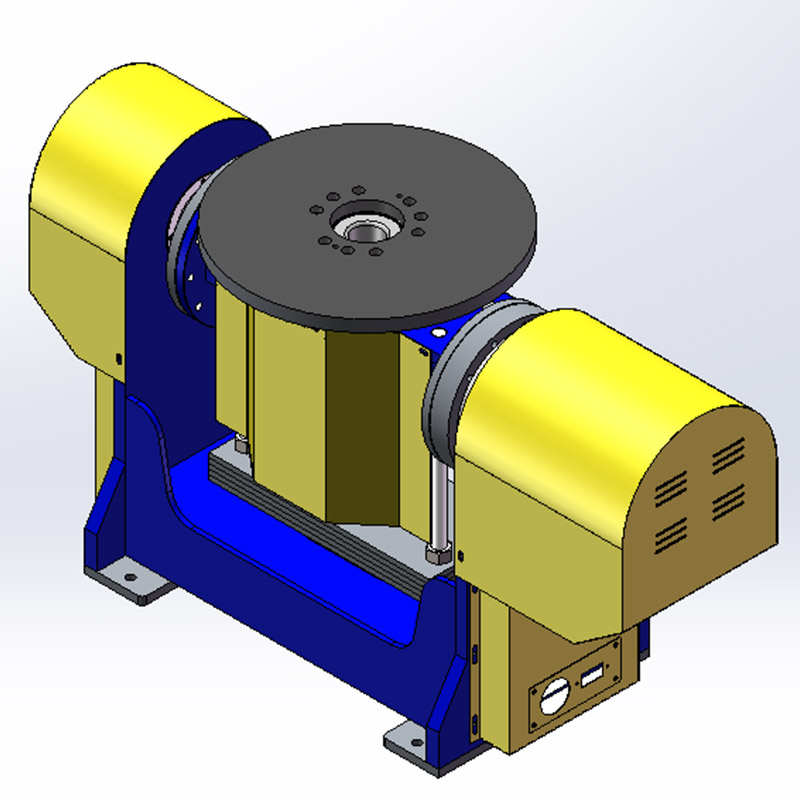 Двухосевой позиционер типа P
Двухосевой позиционер типа P -
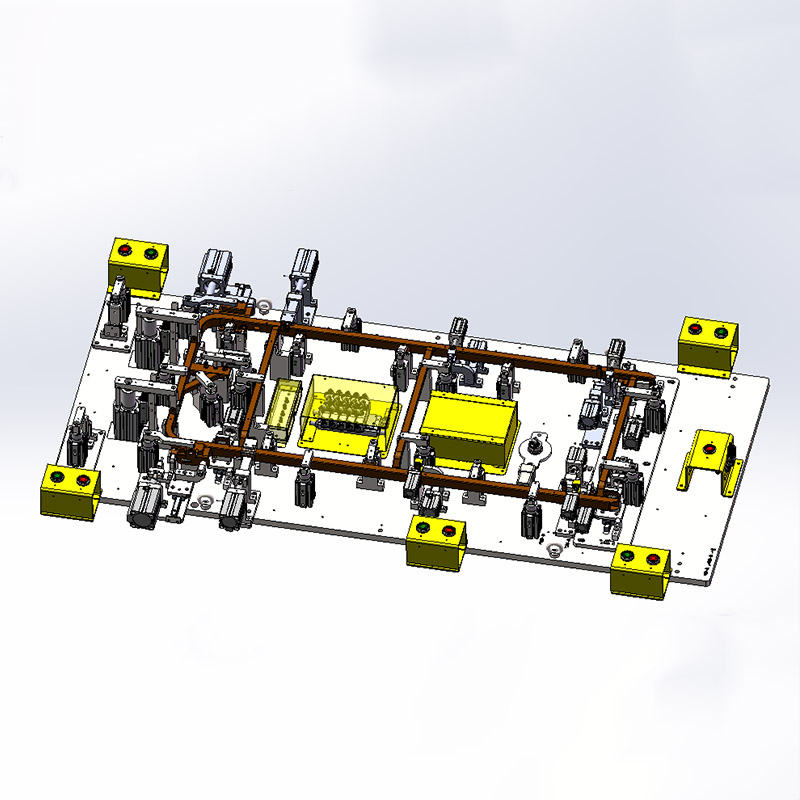 Сварочное приспособление
Сварочное приспособление -
 Panasonic-TL2000
Panasonic-TL2000 -
 Серия AR дуговой сварки YASKAWA
Серия AR дуговой сварки YASKAWA -
 Скайрейл
Скайрейл -
 OTC-FD-V166
OTC-FD-V166 -
 Линия по производству роботизированной точечной сварки
Линия по производству роботизированной точечной сварки -
 Роботизированная линия транспортировки и укладки
Роботизированная линия транспортировки и укладки -
 Роботизированная автоматическая погрузочно-разгрузочная производственная линия
Роботизированная автоматическая погрузочно-разгрузочная производственная линия -
 Серия SP точечной сварки YASKAWA
Серия SP точечной сварки YASKAWA -
 База робота
База робота
Связанный поиск
Связанный поиск- Оптовая продажа аксессуаров для сварочных аппаратов
- Основные покупатели 6-осевых роботизированных манипуляторов OEM
- Производители обработанных оснований для роботов
- Поставщики роботизированных рабочих мест для сварки
- Ведущие покупатели OEM устройств для очистки оружия от брызг
- Оптовая продажа нестандартных ферм
- Цены на аксессуары для станций очистки оружия
- Ведущий покупатель металлообрабатывающих роботов в Китае
- Крупнейшие покупатели сервоиндексаторов
- Поставщики нестандартных автоматических упаковочных линий