



Основание для манипулятора робота
Выбор правильного основания для манипулятора робота является ключевым шагом при проектировании и внедрении роботизированных систем. Оно обеспечивает устойчивость, точность и грузоподъемность, необходимые для выполнения задач. Эта статья предлагает всесторонний обзор оснований, охватывая различные типы, материалы, факторы выбора и практические примеры.
Типы оснований для манипуляторов роботов
Существует несколько основных типов оснований, каждый из которых подходит для определенных применений:
Стационарное основание
Стационарное основание крепится к полу или другой фиксированной поверхности. Оно обеспечивает максимальную устойчивость и грузоподъемность. Обычно используется в производственных цехах, где требуется высокая точность и повторяемость операций.
Мобильное основание
Мобильное основание позволяет перемещать робота по рабочей зоне. Это может быть колесная платформа, гусеничная платформа или даже автоматизированный транспорт (AGV). Мобильные основания полезны для задач, требующих гибкости и перемещения между различными рабочими станциями.
Настенное основание
Настенное основание крепится к стене, потолку или другой вертикальной поверхности. Оно освобождает пространство на полу и идеально подходит для ограниченных пространств. Используется в таких отраслях, как сварка, покраска и обработка материалов.
Материалы основания
Выбор материала основания зависит от нагрузки, условий эксплуатации и требований к точности:
Сталь
Сталь является наиболее распространенным материалом для оснований благодаря своей прочности, долговечности и доступности. Обеспечивает высокую грузоподъемность и устойчивость к вибрациям.
Алюминий
Алюминий легче стали, что может быть критично для мобильных роботов. Он также обладает хорошей коррозионной стойкостью и легко поддается обработке.
Чугун
Чугун обеспечивает отличную виброустойчивость, что важно для задач, требующих высокой точности. Однако он более тяжелый и менее устойчив к коррозии.
Факторы выбора основания
При выборе основания для манипулятора робота необходимо учитывать следующие факторы:
Грузоподъемность
Основание должно выдерживать вес робота и максимальную нагрузку, которую он будет поднимать. Важно учитывать динамические нагрузки, возникающие при движении.
Размер и форма
Размеры основания должны соответствовать размерам робота и рабочей зоне. Форма основания может влиять на устойчивость и доступность.
Точность
Точность позиционирования робота зависит от жесткости и точности основания. Необходимо учитывать требования к повторяемости операций.
Условия эксплуатации
Условия окружающей среды, такие как температура, влажность и наличие пыли, должны учитываться при выборе материала и конструкции основания.
Практические примеры применения
Рассмотрим несколько примеров использования различных типов оснований:
Сварка в автомобильной промышленности
В автомобильной промышленности часто используются стационарные основания для роботов, выполняющих сварку кузовов автомобилей. Высокая точность и стабильность необходимы для обеспечения качества сварных швов.
Обработка материалов на складе
Мобильные роботы с колесными основаниями используются для перемещения грузов на складах. Гибкость и возможность перемещения между различными рабочими станциями являются ключевыми преимуществами.
Упаковка и фасовка
Настенные основания часто применяются для роботов, выполняющих задачи упаковки и фасовки. Это позволяет сэкономить пространство и обеспечить доступ к рабочим областям.
Монтаж и интеграция
Правильный монтаж и интеграция основания являются критическими для обеспечения надежной работы робота:
Крепление
Основание должно быть надежно закреплено к полу, стене или другой поверхности. Необходимо использовать соответствующие крепежные элементы и учитывать требования к безопасности.
Выравнивание
Важно обеспечить точное выравнивание основания, чтобы избежать перекосов и вибраций. Используйте специальные инструменты для выравнивания.
Интеграция
Основание должно быть интегрировано с другими компонентами роботизированной системы, такими как система управления, датчики и периферийное оборудование.
Заключение
Правильный выбор и установка основания для манипулятора робота имеют решающее значение для обеспечения его производительности и надежности. Учитывайте типы оснований, материалы, факторы выбора, практические примеры применения, монтаж и интеграцию для оптимизации работы вашей роботизированной системы. ООО Ханчжоу Лунху Механика и Электроника Технологии предлагает широкий спектр решений для робототехники, включая высококачественные основания и компоненты.
Соответствующая продукция
Соответствующая продукция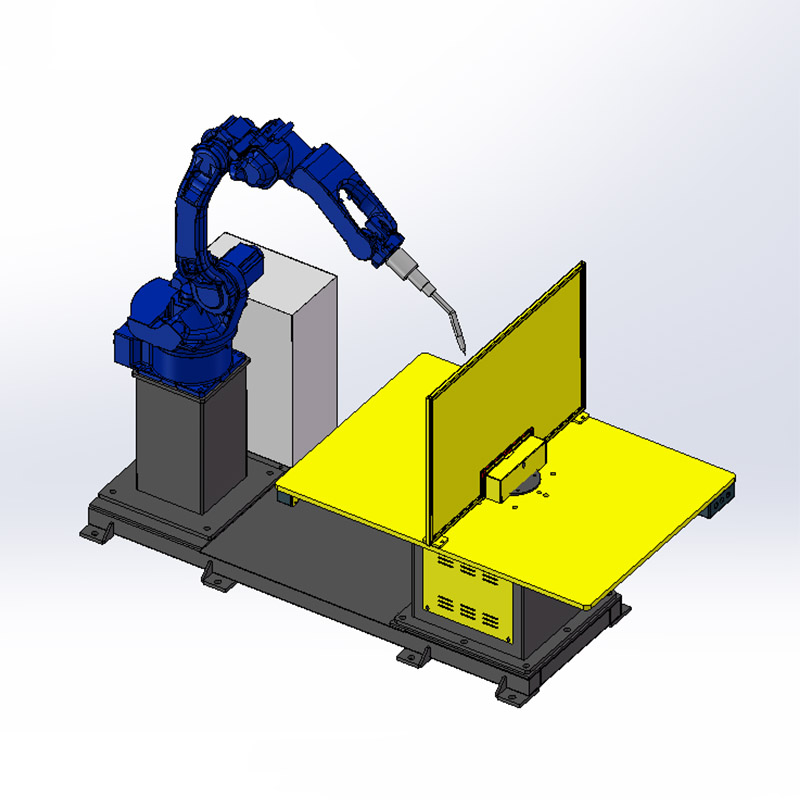



Самые продаваемые продукты
Самые продаваемые продукты-
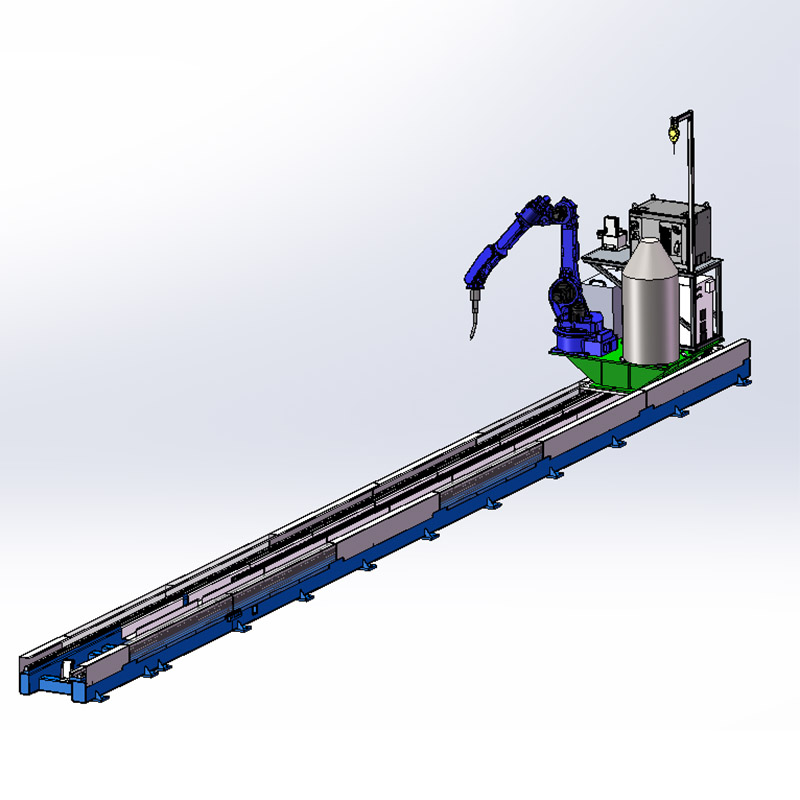 Наземная железная дорога
Наземная железная дорога -
 Panasonic-HH020L
Panasonic-HH020L -
 Линия по производству роботизированной точечной сварки
Линия по производству роботизированной точечной сварки -
 OTC-FD-V6S
OTC-FD-V6S -
 Серия GP универсальных роботов YASKAWA
Серия GP универсальных роботов YASKAWA -
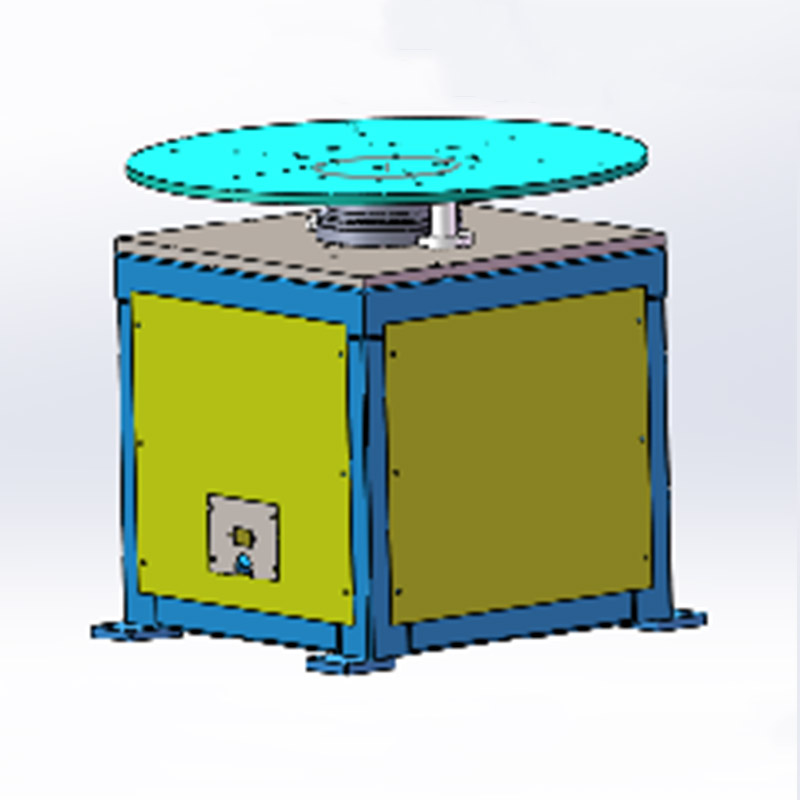
 Двухосевой малый U-образный позиционер
Двухосевой малый U-образный позиционер -
 Трехосевой вертикальный флип-позиционер
Трехосевой вертикальный флип-позиционер -
 База робота
База робота -
 OTC-FD-V166
OTC-FD-V166 -
 Серия сварки FANUC
Серия сварки FANUC -
 Двухосевой позиционер типа L
Двухосевой позиционер типа L -
 Двухосевой большой U-образный позиционер
Двухосевой большой U-образный позиционер
Связанный поиск
Связанный поиск- Заводы по производству станций для чистки оружия
- Поставщики автоматизированной сварочной обработки
- Поставщики решений для механической очистки горелок
- Дешевые заказные рельсы для погрузки/разгрузки станков от ведущих стран-покупателей
- Ведущий покупатель роботизированных сварочных рабочих мест
- Цены на аксессуары для станций очистки оружия
- Основные покупатели сварочных линий OEM
- Ведущий китайский покупатель роботизированных интеллектуальных подъемных дверей
- Направляющая для роботизированной рамы
- Установки для сварки вагонов