



Завод по производству систем управления промышленными роботами
В этой статье мы подробно рассмотрим завод по производству систем управления промышленными роботами. Вы узнаете о ключевых компонентах, технологиях, этапах производства, а также о передовых решениях, применяемых в этой отрасли. Мы погрузимся в тонкости проектирования, сборки и тестирования систем управления, которые обеспечивают слаженную работу промышленных роботов на предприятиях различного профиля. Вы получите ценные знания о выборе поставщиков, интеграции систем и оптимизации производственных процессов.
Введение в производство систем управления промышленными роботами
Завод по производству систем управления промышленными роботами играет ключевую роль в современной автоматизации производства. Эти системы – ?мозг? промышленных роботов, управляющие их движениями, функциями и взаимодействием с окружающей средой. От качества и надежности системы управления напрямую зависит эффективность и производительность робототехнических комплексов.
Основные компоненты систем управления
Системы управления промышленными роботами состоят из нескольких ключевых компонентов:
Контроллеры
Контроллеры – это центральные вычислительные устройства, которые обрабатывают входные данные, выполняют программы и управляют движениями робота. Они включают в себя микропроцессоры, память и порты ввода-вывода.
Приводы
Приводы преобразуют электрические сигналы от контроллера в механическое движение, управляя двигателями робота. Существуют различные типы приводов, включая серводвигатели и шаговые двигатели.
Датчики
Датчики предоставляют информацию о положении, ориентации, скорости и силе, позволяя системе управления контролировать и корректировать движения робота. Примерами датчиков являются энкодеры, акселерометры и датчики силы.
Программное обеспечение
Программное обеспечение включает в себя операционную систему, драйверы и прикладные программы, которые определяют логику работы робота. Оно позволяет программировать, настраивать и контролировать робота.
Технологии, применяемые в производстве
Современные заводы по производству систем управления промышленными роботами используют передовые технологии:
3D-печать
3D-печать позволяет создавать прототипы и компоненты сложной формы, ускоряя процесс разработки и производства.
Автоматизированная сборка
Автоматизированные сборочные линии обеспечивают высокую точность и производительность при сборке электронных компонентов и механических узлов.
Системы машинного зрения
Системы машинного зрения используются для инспекции качества, позиционирования компонентов и навигации роботов.
Этапы производства систем управления
Процесс производства систем управления включает в себя несколько этапов:
Проектирование
На этом этапе разрабатывается схема системы управления, выбираются компоненты и создаются чертежи.
Закупка компонентов
Осуществляется закупка всех необходимых компонентов у надежных поставщиков.
Сборка
Компоненты собираются в единую систему на автоматизированных линиях.
Тестирование
Производится тестирование системы управления для проверки ее работоспособности и соответствия стандартам качества.
Программирование
На систему устанавливается и настраивается программное обеспечение.
Примеры успешных компаний
На рынке существует множество компаний, специализирующихся на производстве систем управления. Вот некоторые из них:
- ABB Robotics
- KUKA Robotics
- Fanuc Robotics
- Yaskawa Motoman
- ООО Ханчжоу Лунху Механика и Электроника Технологии (производитель промышленных роботов и систем управления)
Выбор поставщика систем управления
При выборе поставщика систем управления промышленными роботами необходимо учитывать следующие факторы:
- Технические характеристики системы (производительность, точность, надежность)
- Соответствие стандартам качества и безопасности
- Гарантийное обслуживание и техническая поддержка
- Цена и условия поставки
- Репутация поставщика и опыт работы
Интеграция систем управления
Интеграция систем управления промышленными роботами требует тщательного планирования и профессионального подхода.
Этапы интеграции
- Анализ потребностей производства
- Выбор подходящей системы управления
- Установка и настройка оборудования
- Разработка и внедрение программного обеспечения
- Обучение персонала
- Техническое обслуживание и поддержка
Важные аспекты интеграции
- Совместимость с существующим оборудованием
- Безопасность
- Гибкость и масштабируемость
- Удобство использования
Оптимизация производственных процессов
Эффективное использование систем управления промышленными роботами позволяет оптимизировать производственные процессы:
Автоматизация
Автоматизация позволяет повысить производительность и снизить затраты.
Контроль качества
Системы управления обеспечивают точный контроль качества продукции.
Гибкость производства
Роботы позволяют быстро перенастраивать производственные линии для выпуска новых продуктов.
Сокращение отходов
Точное управление роботами снижает количество брака и отходов.
Преимущества использования систем управления
Использование систем управления промышленными роботами обеспечивает следующие преимущества:
- Повышение производительности
- Улучшение качества продукции
- Снижение затрат
- Повышение безопасности труда
- Гибкость производства
Заключение
Завод по производству систем управления промышленными роботами играет критическую роль в современной промышленности. Выбор надежного поставщика, правильная интеграция и оптимизация производственных процессов – залог успеха автоматизации производства и повышения конкурентоспособности вашего бизнеса. Уделите должное внимание выбору, интеграции и обслуживанию этих систем, чтобы максимально эффективно использовать возможности робототехники.
Таблица: Сравнение характеристик различных контроллеров
| Характеристика | Контроллер A | Контроллер B | Контроллер C |
|---|---|---|---|
| Производительность | Высокая | Средняя | Высокая |
| Поддерживаемые типы роботов | Шарнирные, SCARA | Шарнирные | Все типы |
| Количество осей | До 12 | До 6 | До 16 |
| Программное обеспечение | Собственное | Открытый код | Собственное, с возможностью настройки |
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
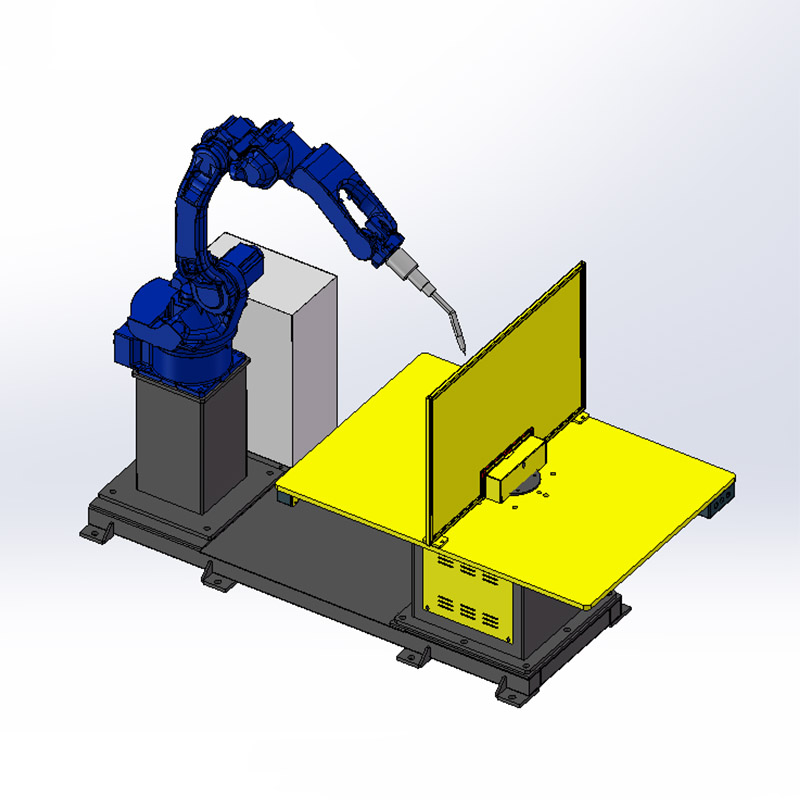
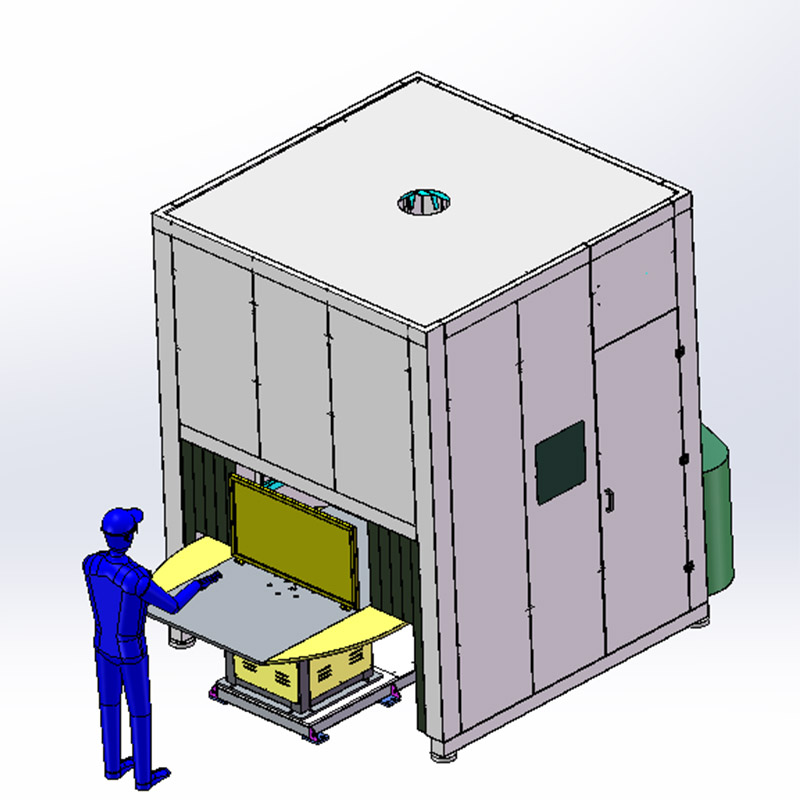 Сварочная рабочая станция
Сварочная рабочая станция -
 Серия AR дуговой сварки YASKAWA
Серия AR дуговой сварки YASKAWA -
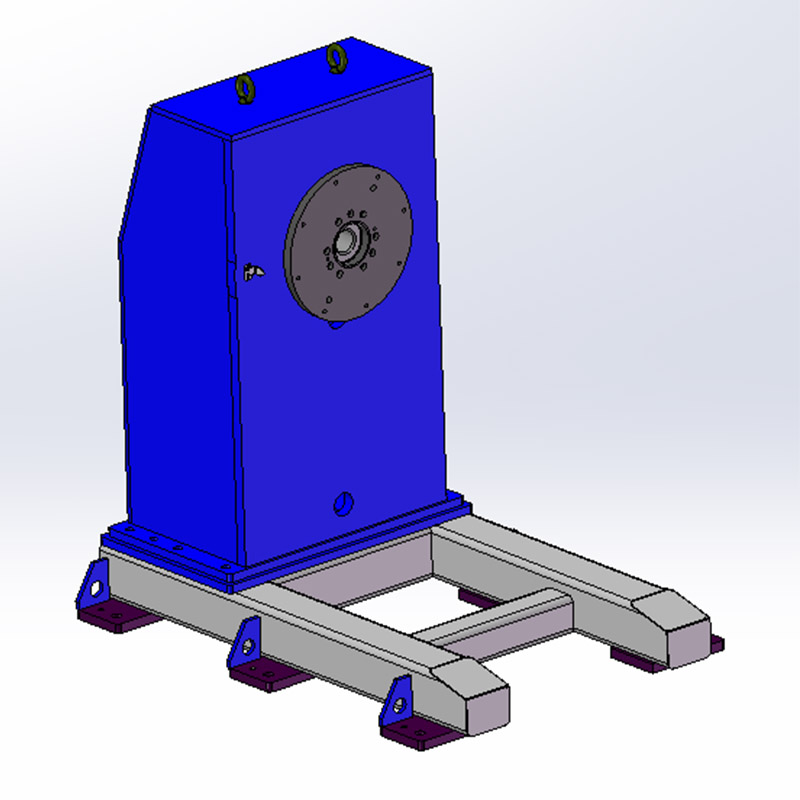
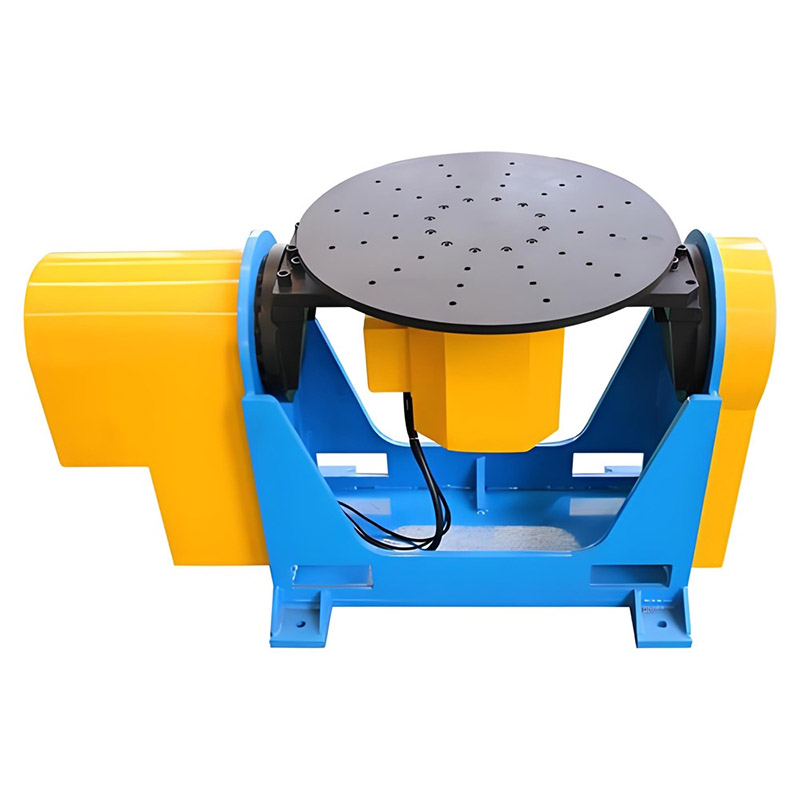
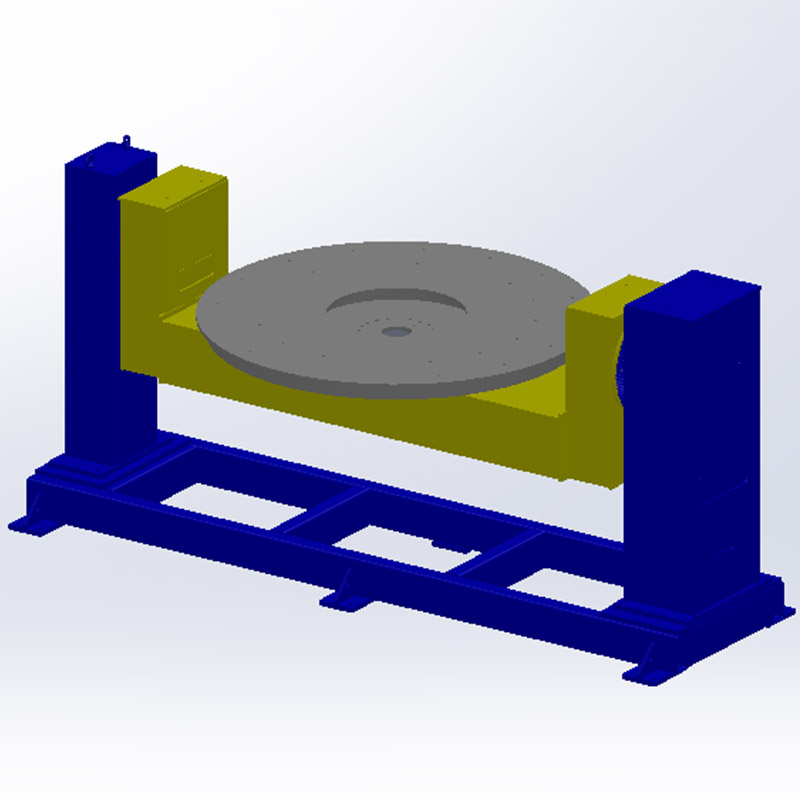 Двухосевой большой U-образный позиционер
Двухосевой большой U-образный позиционер -
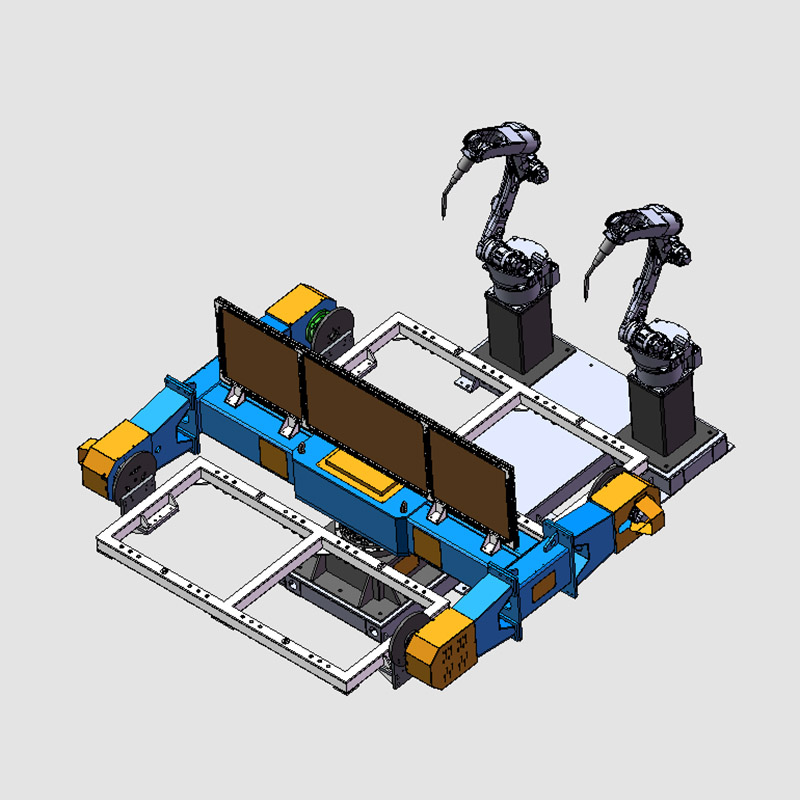 Трехосный горизонтальный поворотный позиционер
Трехосный горизонтальный поворотный позиционер -
 OTC-FD-V166
OTC-FD-V166 -
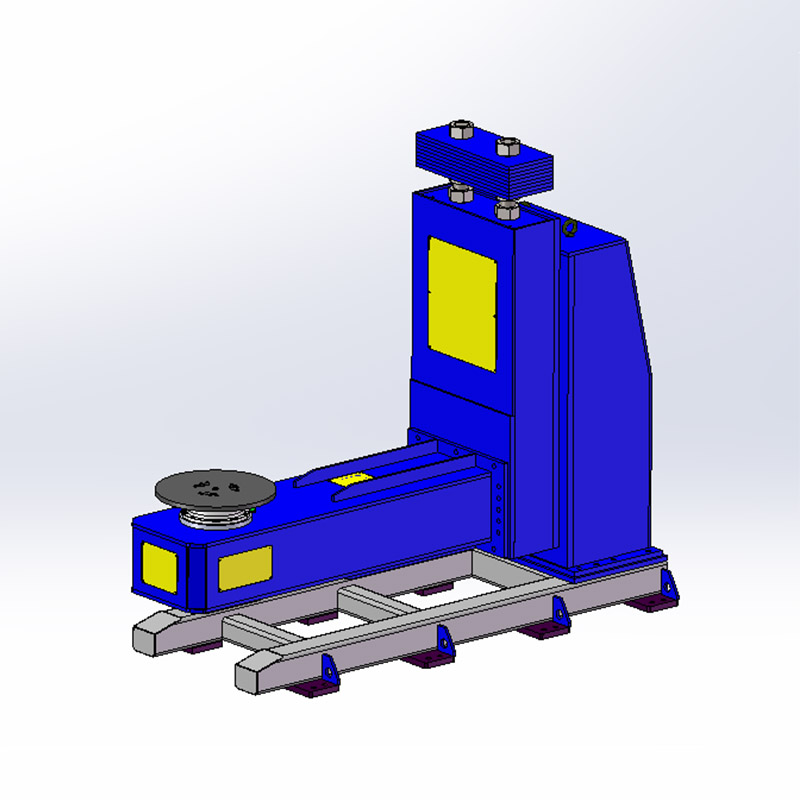 Двухосевой позиционер типа L
Двухосевой позиционер типа L -
 Panasonic-HH020L
Panasonic-HH020L -
 Двухосевой малый U-образный позиционер
Двухосевой малый U-образный позиционер -
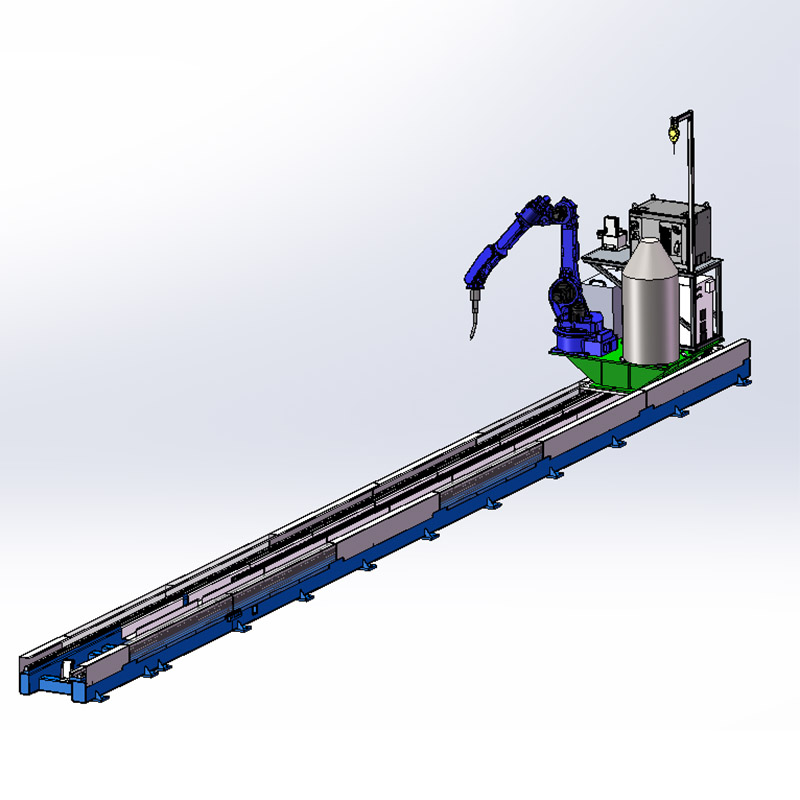 Наземная железная дорога
Наземная железная дорога -
 База робота
База робота -
 Трехосевой асинхронный горизонтальный позиционер
Трехосевой асинхронный горизонтальный позиционер -
 OTC-FD-V6S
OTC-FD-V6S
Связанный поиск
Связанный поиск- Установка для автоматической станции очистки пистолета
- Ведущие покупатели решений для механической очистки резаков из Китая
- Ведущий покупатель роботов для обработки металла
- Цена робота YASKAWA
- Ведущий покупатель автоматизированных сварочных машин
- Оптовые заказные роботы паллетизации от ведущих покупателей
- Поставщики Высокоточные напольные гусеницы для роботов
- Цена на сервоперемещатель
- Дешевые Робот подвесной рельс основные страны-покупатели
- Проектирование инструмента для роботизированной сварки